隨著草莓季節(jié)的到來�����, Dogtooth Technologies靈巧的草莓采摘機器人已準(zhǔn)備就緒���,該機器人內(nèi)置質(zhì)量檢測功能�����,可采摘超市品質(zhì)的水果��。Denso和Certhon還宣布�,他們已開始在歐洲接受自動櫻桃番茄采摘機器人“Artemy”的訂單。這兩家公司都采用了智能機器人技術(shù)�,旨在解決軟質(zhì)農(nóng)產(chǎn)品采摘的精細(xì)任務(wù)。
農(nóng)業(yè)中的軟機器人
智能軟機器人技術(shù)正在幫助發(fā)展和改進農(nóng)業(yè)實踐,以消除勞動密集型任務(wù)的問題并緩解工人短缺問題����。 軟機器人技術(shù)還使農(nóng)場主能夠收集數(shù)據(jù)、分析和改進其流程�,以提高生產(chǎn)力和可持續(xù)性。軟機器人技術(shù)包括執(zhí)行器����、傳感器和適應(yīng)性/柔韌結(jié)構(gòu),可在與環(huán)境交互時進行敏感和復(fù)雜的操作���。
Denso 和 Certhon 的 Artemy 機器人等軟機器人技術(shù)使用由硅膠或橡膠等柔性材料制成的軟夾鉗來采摘漿果和西紅柿等嬌嫩的水果��,而不會弄傷它們����。這些技術(shù)可以減少浪費���,同時提高產(chǎn)品質(zhì)量��。軟機器人技術(shù)設(shè)計靈活�����,可用于植物修剪���、作物疏伐和授粉等任務(wù)���。
此外,軟質(zhì)處理材料可降低日常操作中工人受傷和植物損壞的可能性��。這種處理方式比標(biāo)準(zhǔn)機器人系統(tǒng)具有顯著優(yōu)勢�����。與難以在崎嶇地形上移動的剛性機器人不同���,軟機器人可以適應(yīng)周圍環(huán)境,非常適合戶外農(nóng)場��。

Artemy 使用(基于熱水管的)運行通道和人工智能穿過西紅柿瀑布并挑選成熟的果實進行采摘�����。圖片由Denso提供
Artemy���,番茄采摘機器人
Denso 和 Certhon 的Artemy旨在通過用剪刀剪斷花梗來挑選和采摘櫻桃番茄串?����;üJ欠阎仓甑那o/柄��,用于支撐番茄串或果實的收集����。該軟機器人使用人工智能來識別成熟的番茄,并通過運行通道自動運行����。Artemy 還使用傳感器在運行通道之間安全移動,避開人和障礙物���。當(dāng)板條箱裝滿時���,機器人會自動更換�����,移動到裝有空板條箱的手推車上���,一次性更換所有板條箱。
Artemy 使用可更換電池����,延長了運行時間�,從而提高了生產(chǎn)率����。該機器人還使用發(fā)光二極管在白天和夜間使用補充照明時檢測花梗和花簇��。這些功能可以幫助減輕農(nóng)場工人的勞動負(fù)擔(dān),簡化操作并保持生產(chǎn)力����。

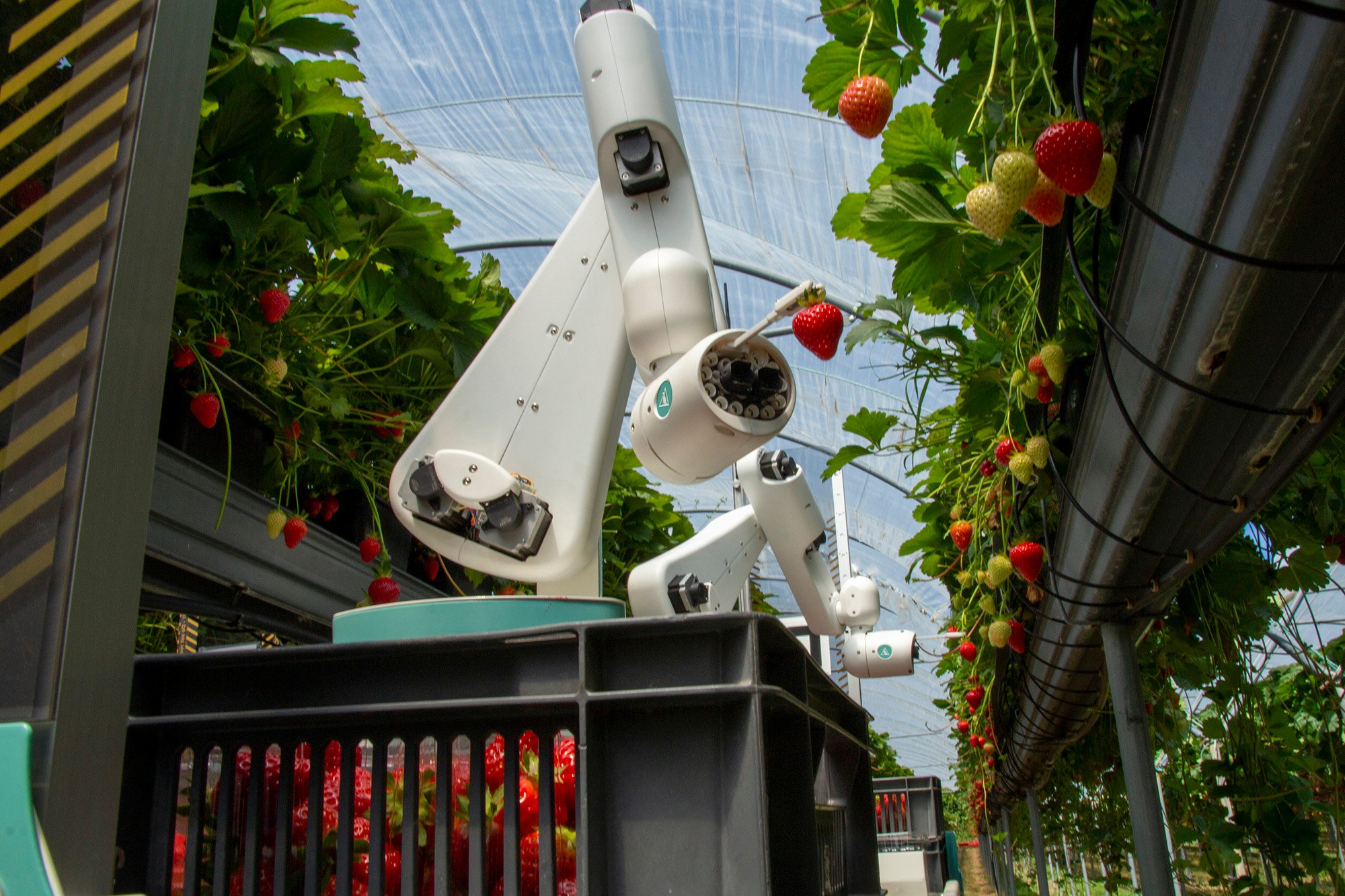
Dogtooth 的草莓采摘機器人使用檢查系統(tǒng)篩選出有缺陷的草莓��,保留超市級水果以便裝入籃子�。圖片由Dogtooth Technologies提供
草莓采摘機器人
Dogtooth Technologies是智能機器人水果采摘列車上的又一乘客��,該公司擁有第五代草莓采摘機器人。Dogtooth 的機器人配備了車載漿果檢測系統(tǒng)����,可以對每顆漿果進行拍照,并只選擇符合超市標(biāo)準(zhǔn)的漿果直接放入籃子中����。
農(nóng)作物種植者可以獲得有關(guān)作物狀況的實時信息,例如產(chǎn)量和缺陷率��?���?蛻艨梢哉{(diào)整分級和果實成熟度參數(shù),權(quán)衡浪費�、收獲率和采摘速度之間的權(quán)衡。Dogtooth 的機器人會穿過每個塑料棚或溫室區(qū)域�����,計算成熟的漿果數(shù)量�����。這種方法使用基于云的軟件用戶界面,可以深入了解作物狀況并準(zhǔn)確預(yù)測 7-14 天的產(chǎn)量�。